Sensores: aplicaciones y tipos
Un sensor es un dispositivo que detecta o mide cambios en el entorno físico y convierte esta información en una señal eléctrica o digital. Los cambios pueden ser de temperatura, presión, luz, movimiento, entre otros. Los sensores se utilizan en una amplia gama de aplicaciones, desde electrónica de consumo, como teléfonos inteligentes y relojes inteligentes, hasta aplicaciones industriales, como sistemas de control de procesos y monitoreo ambiental. Permiten recopilar datos del entorno para su procesamiento, análisis y control. Existe una amplísima variedad de sensores destacando tres grandes grupos:
- Sensores analógicos moduladores
- Sensores analógicos generadores
- Sensores digitales
Existen algunos otros sensores que son difíciles de clasificar en un grupo. Por ejemplo, en algunos casos es difícil diferenciarlos de una interfaz y puede que sea la utilización que se le de, lo que defina su clasificación. Otros se entrelazan con actuadores, complementándose unos con otros, haciendo también difícil la clasificación en este sentido.
Sensores analógicos moduladores
Los sensores analógicos moduladores se clasifican en función del parámetro eléctrico que cambia en respuesta a las variaciones en la magnitud física de entrada. De esta forma podemos tener sensores resistivos, capacitivos, inductivos, etc.
Resistivos
Los sensores resistivos operan mediante la alteración de la resistencia de un conductor (o semiconductor) en respuesta a cambios en una magnitud física específica. Por consiguiente, estos sensores pueden considerarse como dispositivos de resistencia activa. Algunos casos particulares son:
-
Sensores piezorresistivos
-
Potenciómetros (distancia, posición, ángulo)
-
Sensores de temperatura resistivos
-
Termistores
-
Fotorresistencias
-
Higrómetros resistivos
-
Sensores resistivos para detección de gases
-
Magnetorresistencias
Capacitivos
Los sensores capacitivos son dispositivos donde la magnitud física a medir induce cambios en la geometría o en las propiedades de un material dieléctrico, lo que resulta en una modificación en la capacitancia del sensor. En resumen, los sensores capacitivos operan esencialmente como condensadores variables.
-
Medida de distancia y posición
-
Medida de presión, fuerza y aceleración
-
Medida de humedad, análisis químico y nivel de fluidos
Inductivos
Los sensores inductivos son dispositivos en los que la magnitud física a medir causa alteraciones en la geometría o en las propiedades de un material ferromagnético, lo que resulta en un cambio en la inductancia del sensor.
-
Medida de distancia, posición y espesores
-
Medida de presión, fuerza y aceleración
Electromagnéticos
En estos sensores, el cambio en una magnitud física provoca una alteración en un campo magnético o eléctrico, sin modificar la inductancia o la capacidad del sensor. Estos sensores se fundamentan en la ley de Faraday y en el efecto Hall.
Sensores analógicos generadores
Los sensores analógicos generadores, producen una señal eléctrica en respuesta a la magnitud física de entrada. Este tipo de sensores no requieren alimentación externa y necesitan menos cableado que los sensores moduladores. Los sensores generadores se dividen en función del tipo de señal eléctrica que generan. En la categoría de sensores generadores con salida de carga eléctrica se incluyen los sensores piezoeléctricos y los sensores piroeléctricos. Por otro lado, en la categoría de sensores generadores con salida de tensión se encuentran los termopares y los sensores de concentración de iones.
Piezoeléctricos
Los sensores piezoeléctricos aprovechan la generación de cargas eléctricas en un material cuando este se deforma bajo un esfuerzo. Compuestos principalmente por materiales piezoeléctricos como el cuarzo, al aplicar fuerza o presión, el material experimenta deformación. Este proceso provoca una redistribución de la carga en el material, generando una carga positiva en una cara y negativa en la otra, siendo la carga neta proporcional a la fuerza aplicada.
Estos sensores se emplean para medir magnitudes mecánicas como presión, aceleración y fuerzas dinámicas causadas por vibración, oscilación, impacto, compresión o tensión. Aunque tienen una alta sensibilidad, capacidad para detectar variaciones de alta frecuencia y rigidez mecánica, presentan limitaciones importantes: son sensibles a la temperatura y tienen una alta impedancia de salida, por lo que requieren un amplificador electrométrico para acondicionar su señal de salida.
Piroeléctricos
Los sensores piroeléctricos se fundamentan en la generación de cargas eléctricas superficiales en una dirección específica cuando un material experimenta cambios de temperatura debido a la absorción de radiación.
Estos sensores tienen diversas aplicaciones, destacando la medición de temperatura a distancia en entornos industriales o la evaluación de la pérdida de calor en edificaciones. También se emplean para medir la potencia generada por fuentes de radiación, detectar gases que absorben radiación infrarroja y detectar personas o animales mediante la radiación infrarroja.
Por lo general, los sensores piroeléctricos son dispositivos compactos con una alta sensibilidad a los cambios de temperatura. Al no requerir alcanzar el equilibrio térmico con la fuente de radiación, tienen tiempos de respuesta más rápidos que los termistores y los termopares.
Termopares
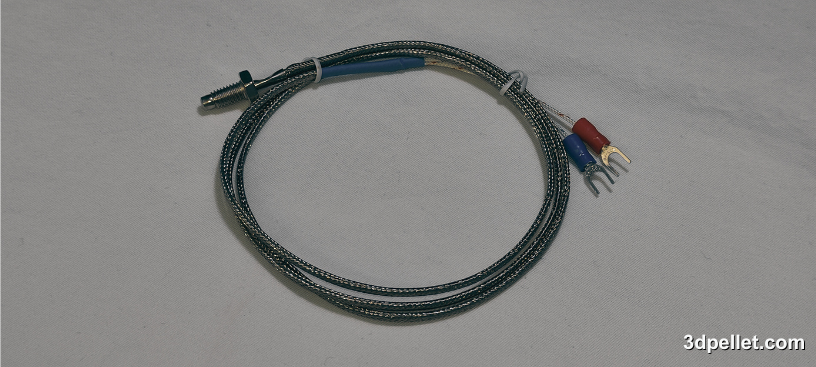
Un termopar es un dispositivo de medición de temperatura compuesto por dos metales diferentes unidos en dos puntos. Su funcionamiento se basa en el principio del efecto Seebeck, el cual establece que cuando los puntos de unión de los dos metales experimentan una diferencia térmica, se genera una tensión proporcional a esta diferencia de temperaturas. Los termopares son sensores de temperatura ampliamente utilizados debido a varias ventajas: poseen un amplio rango de medición, desde -270°C hasta +3000°C; exhiben una alta estabilidad y fiabilidad a largo plazo; ofrecen una mayor precisión que los sensores de temperatura resistivos (RTD) a bajas temperaturas; tienen un tiempo de respuesta del orden de milisegundos; y al no requerir alimentación externa, no sufren de autocalentamiento.
Sin embargo, los termopares también presentan limitaciones. En primer lugar, el circuito de acondicionamiento debe asegurar que la corriente que fluye a través del termopar sea mínima para evitar errores de medición. En segundo lugar, se requiere mantener una de las dos uniones a una temperatura de referencia constante. Por último, la respuesta del termopar es no lineal, lo que generalmente necesita corrección en el acondicionamiento de la señal.
Sensores digitales
Los sensores digitales generan salidas digitales directamente a partir de la magnitud física de entrada. Por lo tanto, no necesitan una etapa de conversión analógico-digital. Entre los sensores digitales más comunes se encuentran los encoders o codificadores de posición, utilizados para medir desplazamientos lineales o angulares mediante contacto físico.
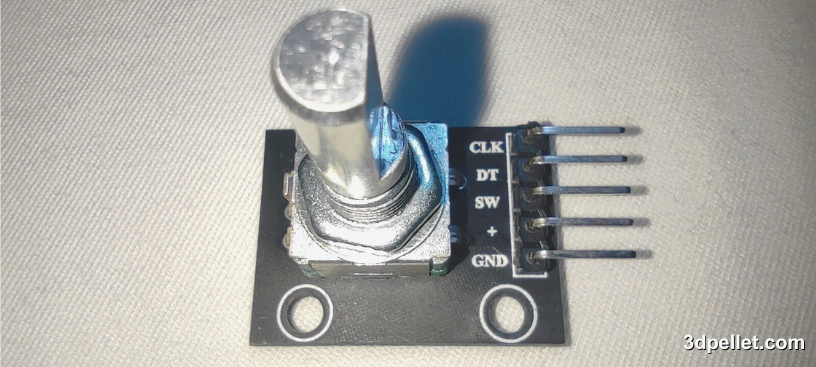
Encoder de posición incremental
El encoder de posición incremental, utilizado para medir desplazamientos lineales, consta de dos partes principales: una cinta o regla codificada estática y un cabezal detector móvil que se mueve junto al objeto cuya posición lineal se desea medir. La regla codificada está dividida en pequeños sectores con propiedades diferenciadoras. El cabezal móvil incorpora sensores electromagnéticos u ópticos para detectar el cambio de un sector a otro en la regla codificada, lo que produce un cambio en una señal digital de salida cada vez que se desplaza una distancia fija.
El encoder de posición incremental utilizado para medir desplazamientos angulares, tiene un funcionamiento similar al lineal pero en lugar de una regla utiliza un disco codificado que se mueve junto al objeto cuya posición angular se desea medir. El disco codificado está dividido en sectores, y cada vez que el disco se desplaza un ángulo fijo entre dos sectores, el cabezal genera un cambio en una señal digital de salida.
Ambos tipos de encoders de posición son incrementales ya que para obtener la posición absoluta con respecto a una posición de referencia, se debe utilizar un contador de pulsos (o similar) y un componente que determine el sentido del movimiento. Esta posición de referencia se establece generalmente colocando un final de carrera en el extremo de la regla codificada. En caso de una interrupción en la alimentación del sistema, será necesario desplazar el cabezal detector hasta el final de carrera.
Encoder de posición absoluto
En el encoder de posición absoluto, ya sea lineal o angular, cada sección de la regla o disco codificado está asociada a un código binario único. En consecuencia, la salida de estos encoders consiste directamente en una señal codificada que representa la posición absoluta, ya sea lineal o angular, con respecto a una referencia establecida por el propio sensor.
Sensor DHT11 con Arduino
Tutorial sobre el funcionamiento y utilización con Arduino del sensor DHT11.
Sensor HC-SR501 con Arduino
Tutorial sobre el funcionamiento y utilización con Arduino del sensor PIR HC-SR501